Sonar complexes and systems
Models
Hydroacoustic station “TRONKA”
 It is intended for detection of underwater diversionary forces and means (UDFM) to protect: the ships at their anchorage in the high sea, on roadstead, in unprotected points of basing; the hydro-engineering and important objects in ports and harbors. The station provides: UDFM automated detection, tracking and classification; automated measurement of detected targets coordinates and data transfer to the fire control systems. The station it is provided the detection of swimmer with closed type aqualung at the distance up to 500 m, depth from 1 to 40 m, at sea roughness up to 3 balls, with accuracy of 1.5 % in range and 2 deg in elevation. Up to 6 targets may be detected and tracked simultaneously.
It is intended for detection of underwater diversionary forces and means (UDFM) to protect: the ships at their anchorage in the high sea, on roadstead, in unprotected points of basing; the hydro-engineering and important objects in ports and harbors. The station provides: UDFM automated detection, tracking and classification; automated measurement of detected targets coordinates and data transfer to the fire control systems. The station it is provided the detection of swimmer with closed type aqualung at the distance up to 500 m, depth from 1 to 40 m, at sea roughness up to 3 balls, with accuracy of 1.5 % in range and 2 deg in elevation. Up to 6 targets may be detected and tracked simultaneously.
Sonar system for securing of coastal zones
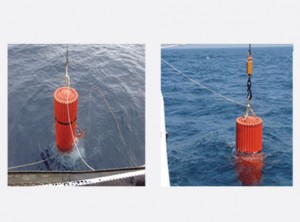
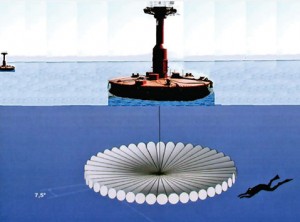
Sonar System of coastal zone underwater guarding signalization
The system can detect submarines moving with different speed, provides direction of movement and coordinates
Information about detected moving underwater object is transmitted to coastal post via the desk-size radio buoys of VHF band
Consists of
- Radio receiving costal posts
- Anchor passive radiohydroacoustic (sonar) stations (APRHAS)
- Released from under water stations (APRHAS) the desk-size radio buoys of VHF band
Hydroacoustic station for detection of high speed targets
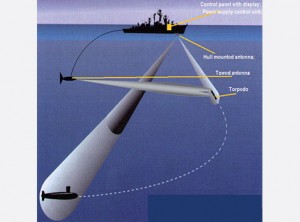
Hydroacoustic (sonar) station for detection of high speed small size target
Designation:
- the station is destinated for protection of ships
- detection of small size highspeed targets (of torpedo type)
- detection of active homing systems signals
- measurement of underwater sound speed and forecasting of distance
- indication of information on the display
- measurement of coordinates and other data about the target
- storage of information
- automatic system functioning control
Universal directional command active sonobuoy

Universal Directional Command Active Sonobuoy Designation:
- detection of submerged submarine and definition of direction of the submarine
- buoy is engaged from the helicopters, planes, ships, can be thrown down with the use of Launch containers (SLC) of the type LAU-111/A or LAU-126/A
- the buoy is combined with onboard equipment DICASS, and also with transmitter of control commands CASS (ASA-79)
Composition
- Parachute
- Radio electronic device
- Power supply unit
- Acoustic array
- Hydroacoustic device
Transducers and antennas

Power low-frequency ring transducer

Power low-frequency flextensional transducer

Power low-frequency flextensional transducer

Power piezoelectric rod transducer

Low-frequency plate piezoceramic transducer

Antenna array

Cylindrical array
Dipping sonar for helicopters
 System designed to accomplish the undersea warfare (USW) missions:
System designed to accomplish the undersea warfare (USW) missions:
detection, localization and classification of submarines, as well as acoustic interception and environmental data acquisition
Main advantages
- Low frequency of operation ensures improved deep and shallow water detection ranges
- Expanded search rate capability with reduced time on station
- Multi frequency operations adaptive to changing environmental conditions ensures superior performance against slow/stationary target
- Environmental intelligence gathering
Hull mounted sonar
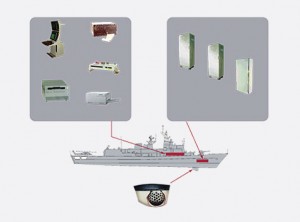 System designed for detection, localization and classification of submarines
System designed for detection, localization and classification of submarines
Main advantages
Automatic classification of targets:
- submarine, surface ship, torpedo, decoy targets
- detection submarines, surface ships in hydrolocation mode
- detection of submarines, surface ships and torpedoes in listening passive detection mode
- coordination with combat management system
- detection hydro acoustic signals
- underwater communication and identification
- noise control
- measurement hydrology and forecast
DS Series mobile degaussing complex

The mobile complex is intended for electromagnetic treatment (EMT) of different naval objects with following main tasks:
- decrease of resultant magnetic field up to the demanded range
- directional formation of ship magnetic state
- check ranging of magnetic state of ship
The dynamic uncoiled degaussing of naval objects is implemented by electromagnetic field of electric current running through the object following sequence:
- vessel magnetic field (VMF) measurement by portable system with single axis sensors
- overturning of recovered VMF
- 1st VMF compensation
- 2nd VMF compensation
Main features of EMT with DS stations
- Mobility of the complex
- Allows degaussing without application of coils wrapping around the ship
- Reduced time and energy resources
- Use of autonomous diesel generators
- Possibility of transportation to the place of magnetic treatment by land or sea