Automated underwater vehicles
Models
Project “OFFSHORE SAFETY”
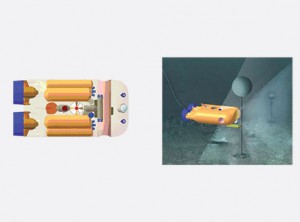 Search, inspection underwater works. On-line moni toring of underwater situation of coastal waters of the country by video-, hydroacoustic- and magnetometrec methods. Counter- terrorist and counter-diversion missions. Neutralization of potentially dangerous objects with the use of manipulators. In spection of underwater part of ship’s hull etc.
Search, inspection underwater works. On-line moni toring of underwater situation of coastal waters of the country by video-, hydroacoustic- and magnetometrec methods. Counter- terrorist and counter-diversion missions. Neutralization of potentially dangerous objects with the use of manipulators. In spection of underwater part of ship’s hull etc.
Project “BL-50”
Search, inspection underwater works.
“SEARCHER” type
 Search, inspection underwater works.
Search, inspection underwater works.

CARUS-1
 Research and monitoring of rift zones of Atlantic ocean.
Research and monitoring of rift zones of Atlantic ocean.
The NORTH STAR
 Search, inspection underwater works in north hydro-meteorologic conditions.
Search, inspection underwater works in north hydro-meteorologic conditions.

Multipurpose AUV “SEABEETLEH200”

- Bathymetric surveys
- Inspection of pipelines
- Environmental surveys
- Pre-build and post build surveys of pipelines and platforms
Multipurpose AUV “BURBOT H300”
 System designed for autonomous remote inspection of underwater environment.
System designed for autonomous remote inspection of underwater environment.